Deep learning architecture
Figure 1 summarizes the overall workflow. First of all, to explore the quantum phases of moiré materials, a neural network is employed to represent the many-body wavefunction. The neural network wavefunction Ψnet has…
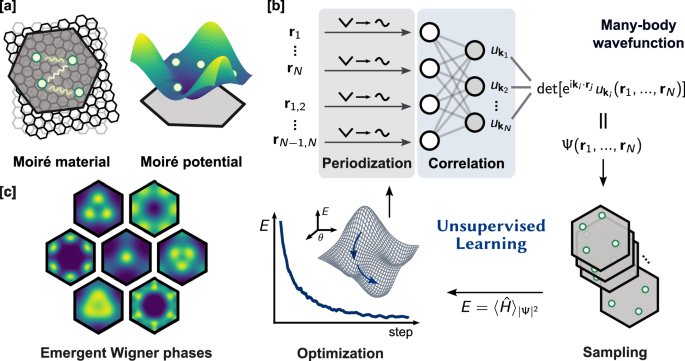
Figure 1 summarizes the overall workflow. First of all, to explore the quantum phases of moiré materials, a neural network is employed to represent the many-body wavefunction. The neural network wavefunction Ψnet has…
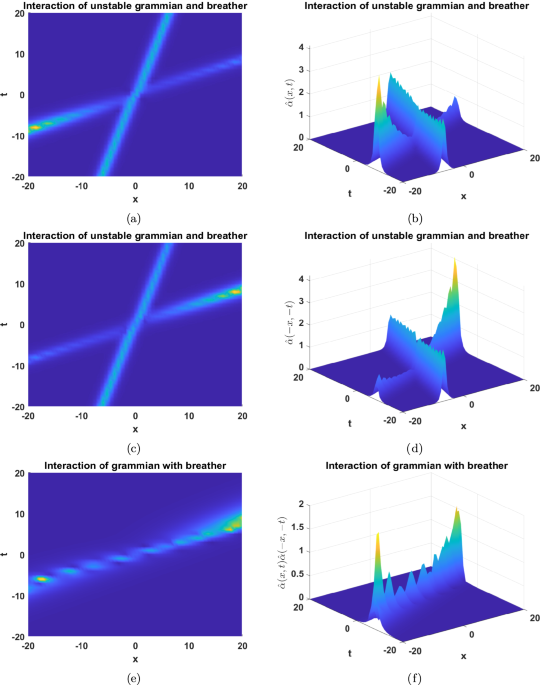
The short pulse (SP) equation is well known equation used for describing the propagation of ultra-short optical pulses in quartz fibers by Schafer and Wayneo1,2. The SP equation is
$$\begin{aligned} \beta _{xt}=\beta +\frac{1}{6}\left( \beta…

Pedestrian movements within the university campus will be described by first introducing a campus walking network. In this network, arcs represent pedestrian infrastructures, i.e. pavements, other footpaths and pedestrian crossings, with their…
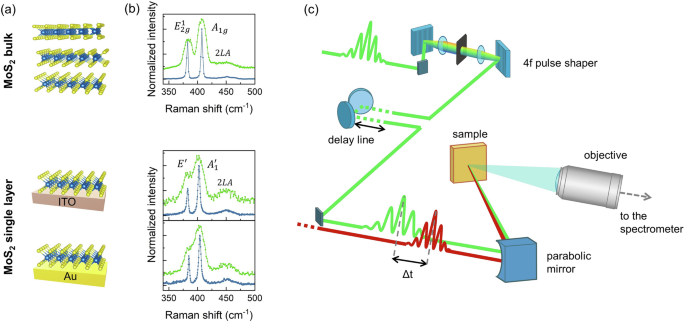
Figure 1a shows the structure of the investigated systems: bulk MoS2, where no substrate effects are expected; 1 L MoS2/ITO, i.e. single-layer MoS2 on an indium tin oxide substrate, which…
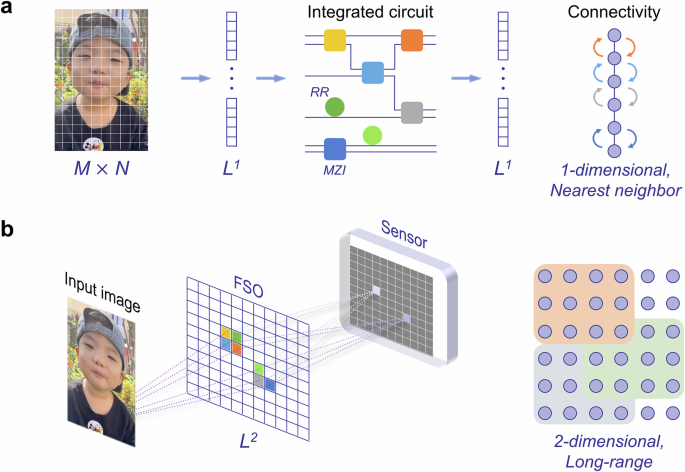
First, we will discuss how the size and complexity of the FSO encoder can be dramatically reduced using emerging nanophotonic structures. For a long time, all the FSO encoders are implemented in discrete macroscopic optics (e.g., lens, mirror,…
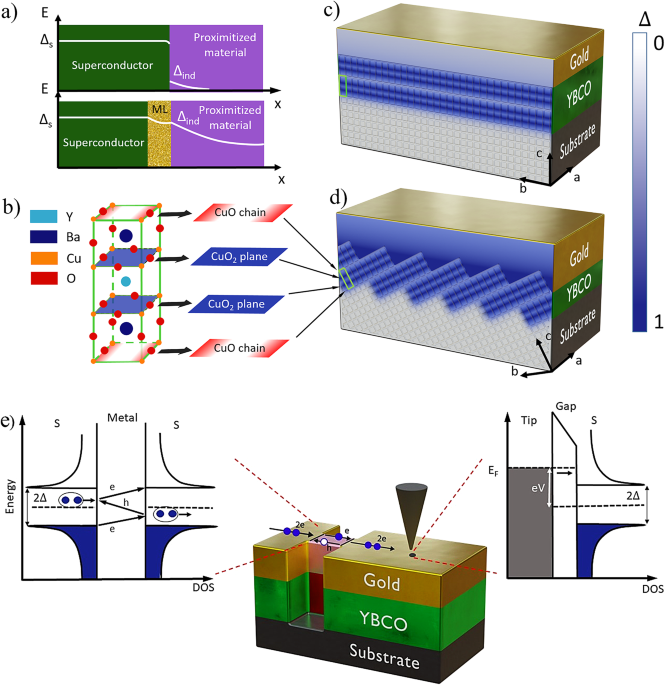
We fabricated a number of Au/YBCO heterostructures consisting of 30 to 35-nm-thick epitaxial YBCO films deposited on vicinal SrTiO3 (STO) and NdGaO3 (NGO) substrates and covered in situ with a 15-nm-thick gold layer. Since a low…
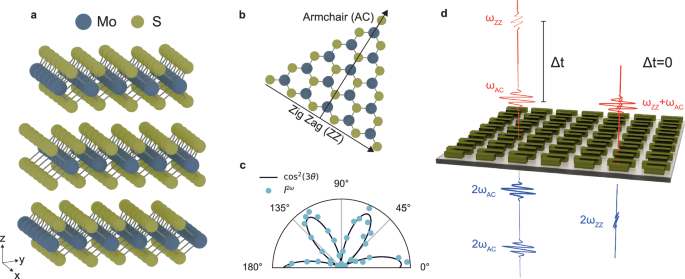
The rhombohedral 3R and hexagonal 2H phases of TMDCs differ significantly in their stacking arrangements, which profoundly impact their symmetry and nonlinear optical properties. In the more common 2H phase,…
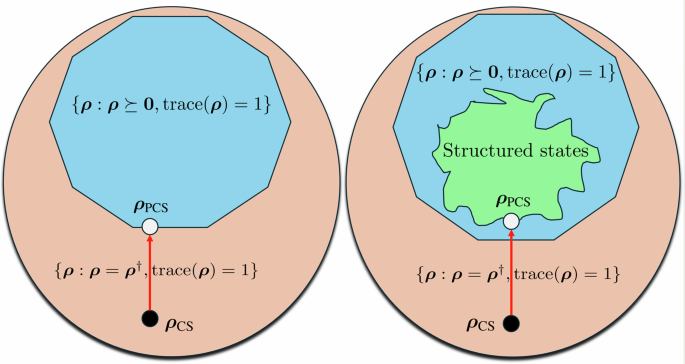
This section provides detailed proofs and a comprehensive description of the MLE-based methods (LR-MLE and MPO-MLE) introduced in the last section.
We expand
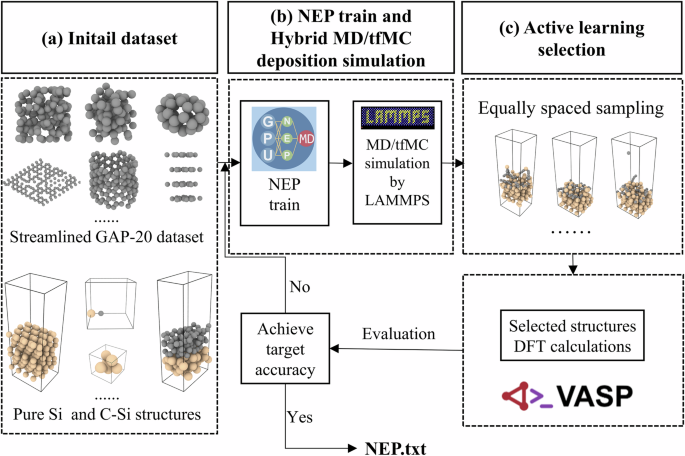
As illustrated in Fig. 1, an active learning workflow was employed to develop a high-accuracy MLP for carbon deposition. This framework iteratively integrates NEP training and DFT validation during hybrid MD/tfMC…
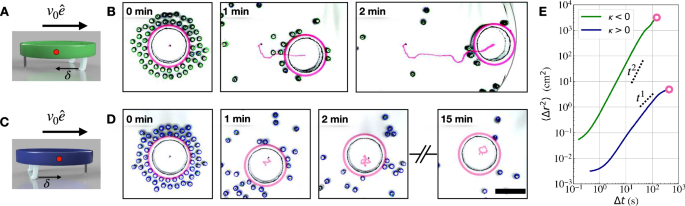
Stochastic self-propelled robots were built following a modified bristle bot design36,38,40,44. A robot (sizing 5–6 cm in diameter) is driven by two vibration motors mounted on a tripod with one stiff leg…