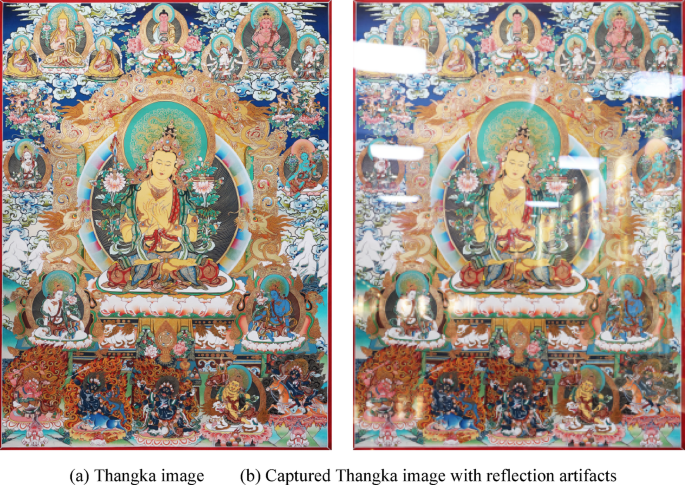
Li, Y. et al. Two-stage single image reflection removal with reflection-aware guidance. Appl. Intell. 53(16), 19433–19448. https://doi.org/10.1007/s10489-022-04391-6 (2023).
Google Scholar
Li, Y. et al. Two-stage single image reflection removal with reflection-aware guidance. Appl. Intell. 53(16), 19433–19448. https://doi.org/10.1007/s10489-022-04391-6 (2023).
Google Scholar
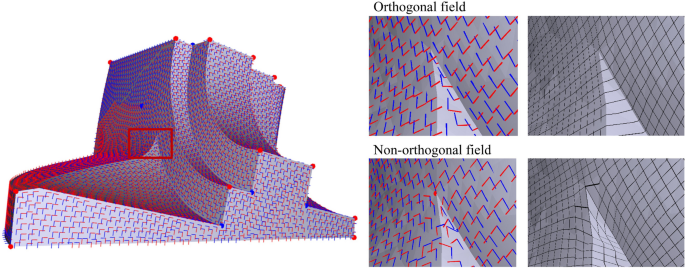
In traditional surface modeling, an 4-rotational-symmetric field, also called cross field, refers to the collection of 4 symmetric vectors at surface-tangential plane26,27. While the cross field is widely used as a natural directional reference…
To verify the effectiveness and superiority of the method proposed in this paper, experimental verification has been carried out for two bearing datasets: the bearing dataset of Case Western Reserve University40, the bearing dataset of Southeast…
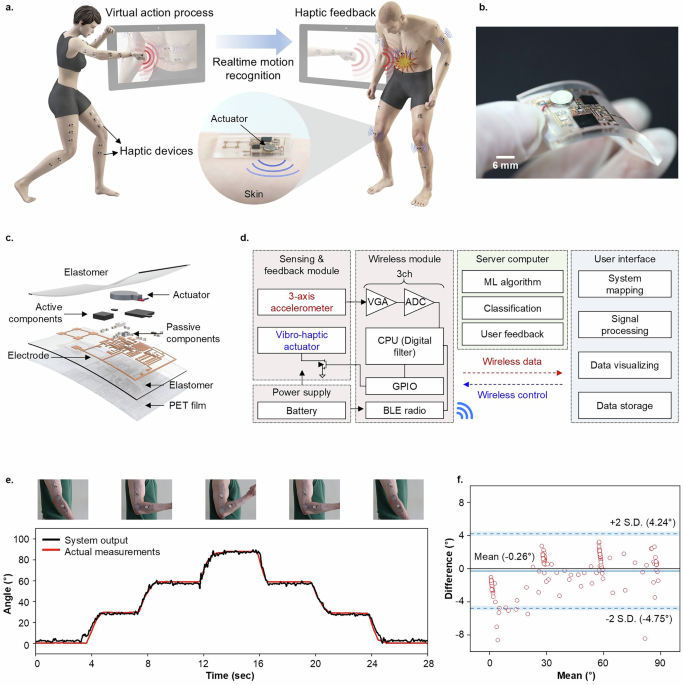
All the experimental procedures involving human subjects were conducted in accordance with the approved protocols by the Sungkyunkwan University Bioethics Committee (Institutional Review Board; IRB, approval number: SKKU…
Momtazmanesh, S. et al. Global burden of chronic respiratory diseases and risk factors, 1990–2019: an update from the Global Burden of Disease Study 2019. eClinicalMedicine 59, 101936. https://doi.org/10.1016/j.eclinm.2023.101936 (2023).
We start with some background knowledge on symmetry detection using the formalism of Lie theory, following an approach by34 and recently applied to the same problem in31. For the interested reader, for a…
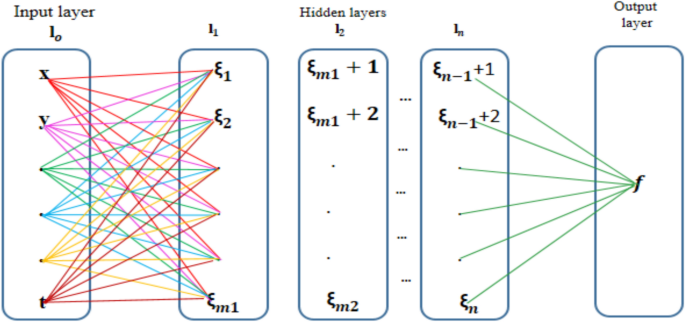
In this part, using \(“4-2-1″\) neural network model, we will obtain solutions of (3 + 1)-D WKB equation. This will be done by following the summarized steps outlined in Section “BNNM along with its conforming tensor formulation”.
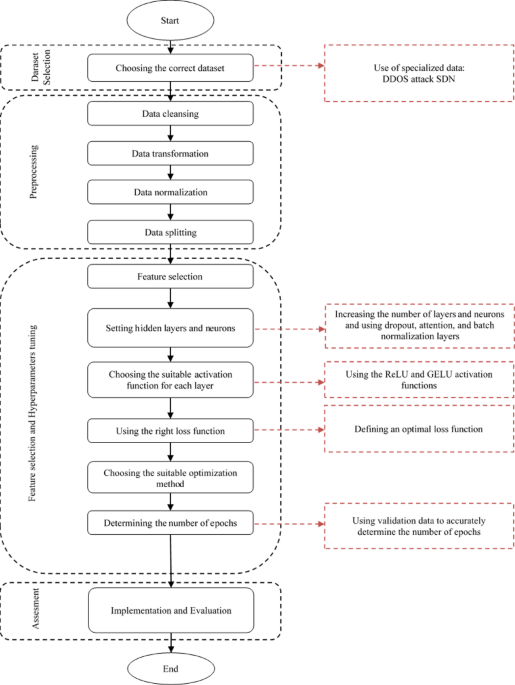
The system model for DDoS detection is centrally located within the SDN controller, which provides a comprehensive view of network activity. By residing within the controller, the model leverages its centralized vantage point to monitor and…
Marshall, A.W., & Olkin, I. A new method for adding a parameter to a family of distributions with application to the exponential and Weibull families. Biometrika 84(3), 641–652. https://www.jstor.org/stable/2337585 (1997).
Almetwally, E. M.,…

The Robotics Toolbox in MATLAB enable tasks such as robot arm modeling, workspace simulation analysis, trajectory planning, etc., and present simulation results in the form of images for easy observation of the motion state of the robot arm19. To…