Problem formulation
In this section, we formulate the problem of hydraulic support anomaly detection in coal mines as an unsupervised learning task. The objective is to identify abnormal patterns in the pressure time series data of hydraulic…
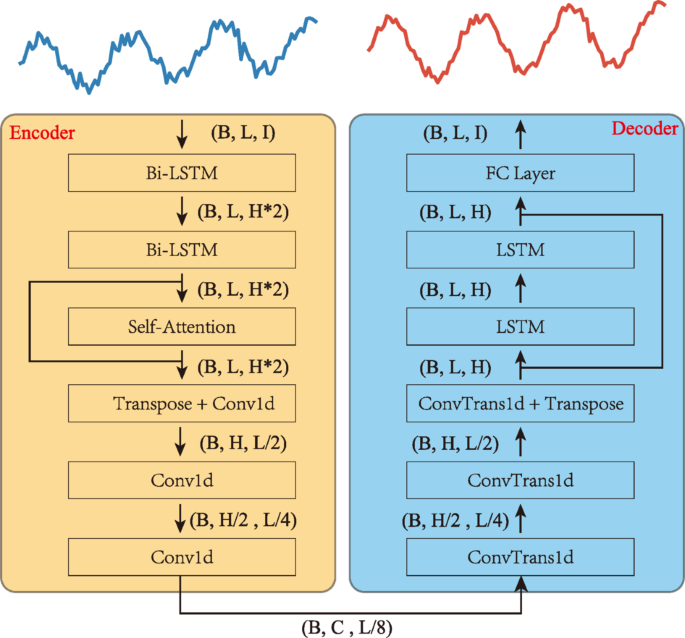
In this section, we formulate the problem of hydraulic support anomaly detection in coal mines as an unsupervised learning task. The objective is to identify abnormal patterns in the pressure time series data of hydraulic…
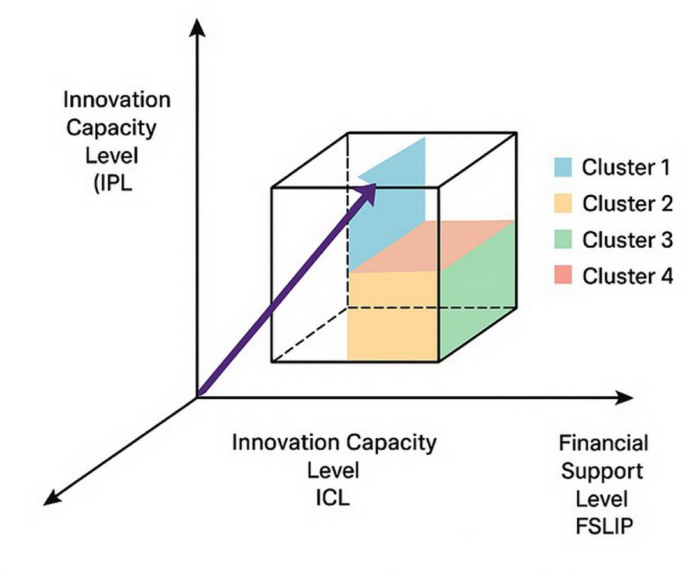
The obtained indicators of the enterprise innovation management efficiency based on the proposed system of indicators in three areas are given in Table 3.
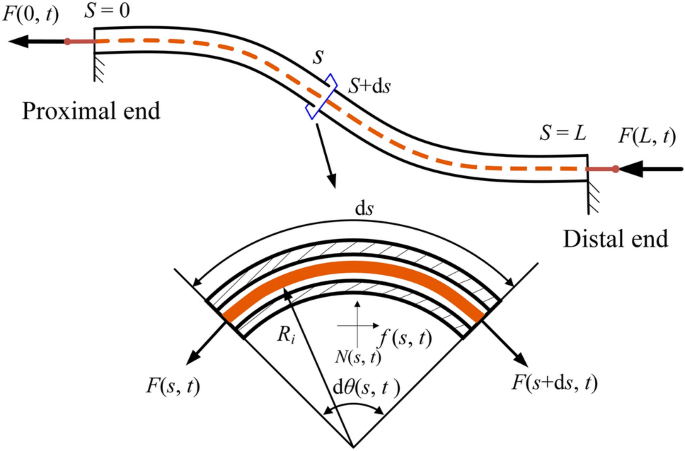
In the connection of structural components in the tendon-sheath transmission system, the distal force and position are significant. Therefore, it is necessary to explore dynamic and static models of TSAS based on its structural and transmission…
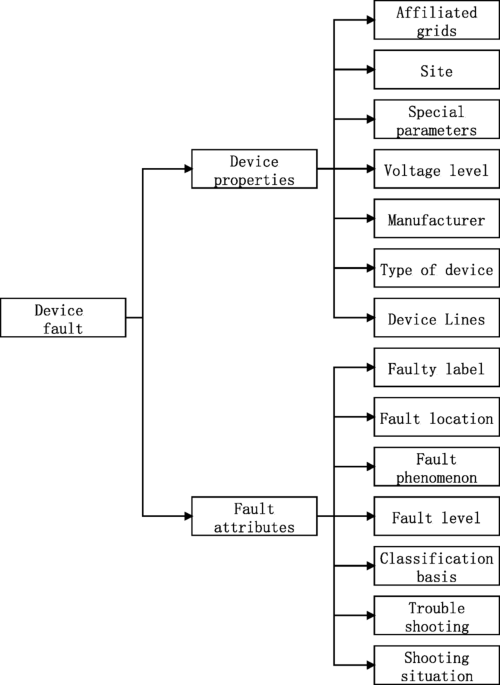
Information extraction extracts and stores the knowledge contained in the information source through the processes of identification, analysis, screening and generalization to form a knowledge base16.More research is currently being done on…
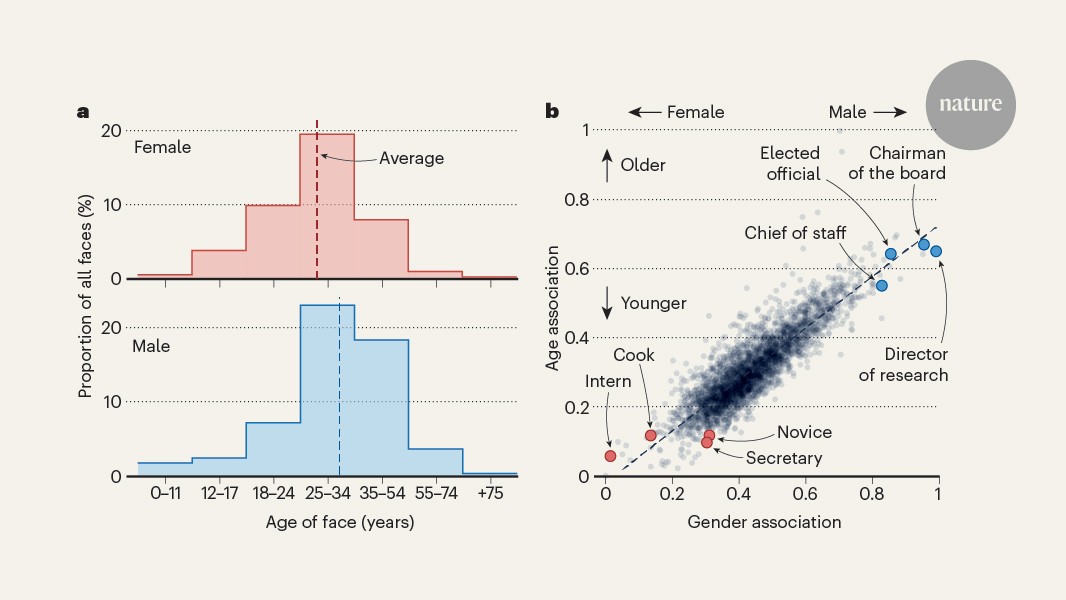
Charlesworth, T. E. S., Yang, V., Mann, T. C., Kurdi, B. & Banaji, M. R. Psychol. Sci. 32, 218–240 (2021).
Google Scholar
Guilbeault, D. et al. Nature 626, 1049–1055 (2024).
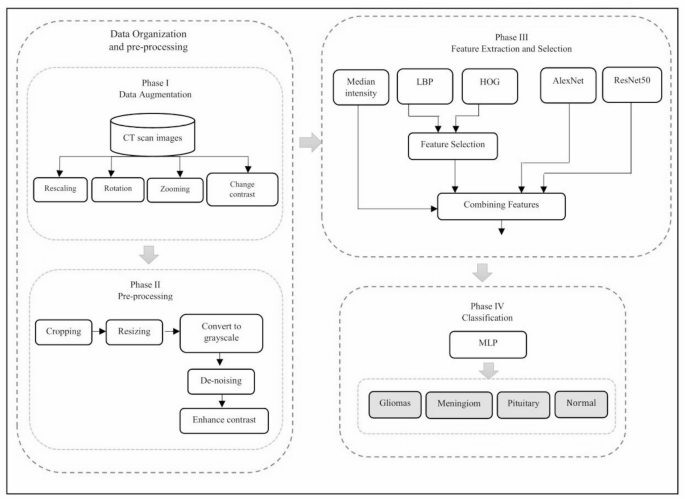
In this section, we explain our proposed framework. The proposed framework has different stages, including image acquisition, pre-processing, feature extraction, feature selection, and classification. The proposed methodology starts with the…
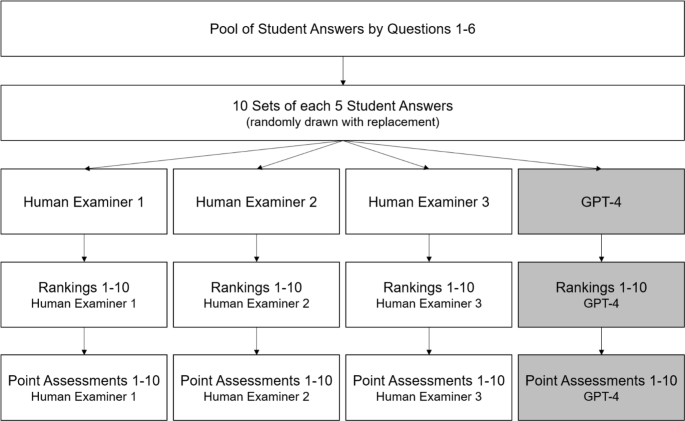
We test Hypothesis 1 – whether IRR drops when replacing a human examiner with GPT-4 – separately for our two tasks as different statistics are to be applied. For the ranking task, we use Quadratic Weighted…
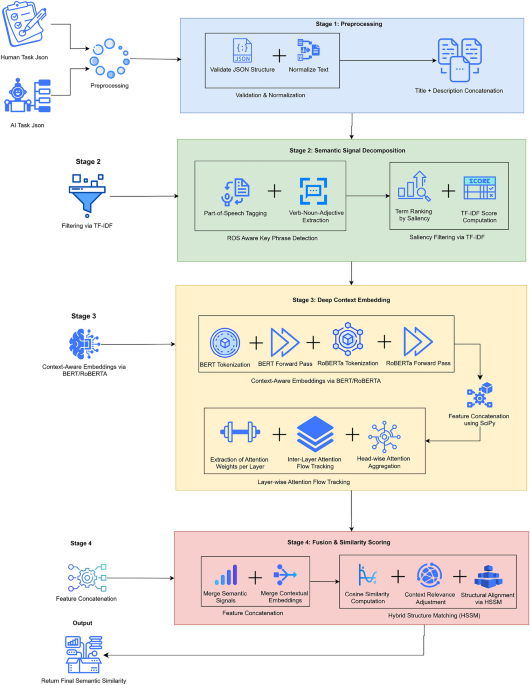
We evaluate the ability of large language models to convert unstructured project descriptions into structured task flows through a tightly controlled, multi-stage pipeline combining human annotation, prompting, normalization, semantic…
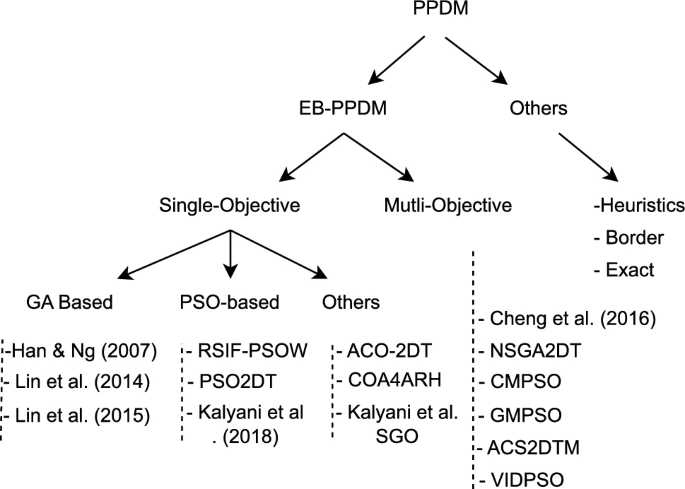
This section presents a detailed discussion of the proposed sensitivity and length-based dynamic multi-threshold victim deletion-based scheme for data sanitization. The proposed scheme consists of two phases that are near-optimal victim item…
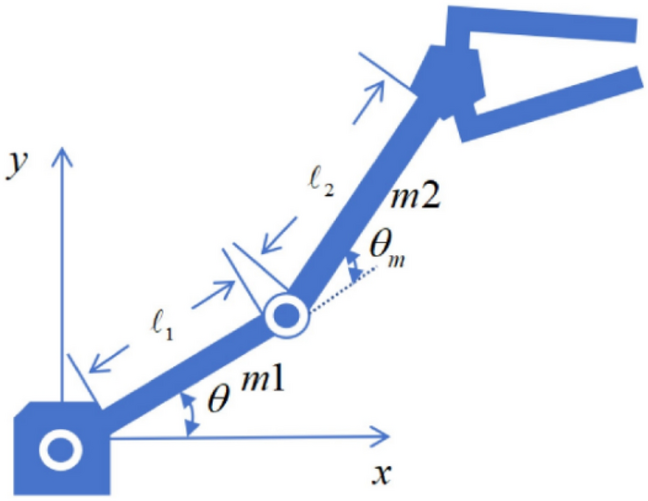
Based on the dynamic surface control algorithm driven by position and velocity disturbance factors, an adaptive control system driven by position and velocity disturbance factors is designed, and the system includes a K observer and a controller.