Silverstein, M., Gans, D. & Yang, F. M. Intergenerational support to aging parents: The role of norms and needs. J. Fam. Issues 27(8), 1068–1084 (2006).
Google Scholar
Hu, B. & Ma, S. Receipt…
Silverstein, M., Gans, D. & Yang, F. M. Intergenerational support to aging parents: The role of norms and needs. J. Fam. Issues 27(8), 1068–1084 (2006).
Google Scholar
Hu, B. & Ma, S. Receipt…
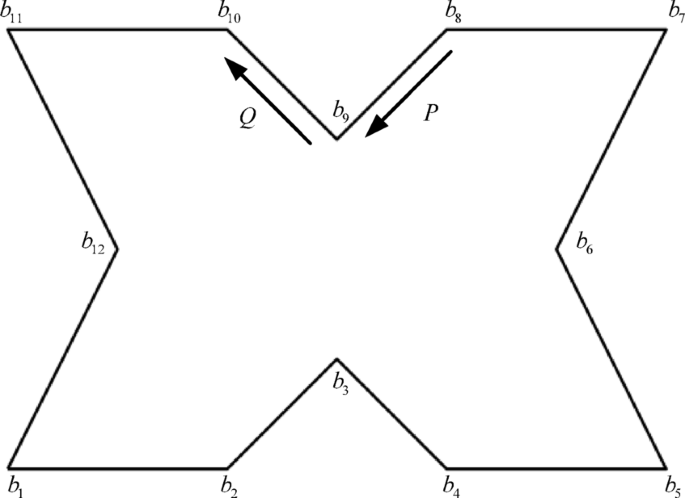
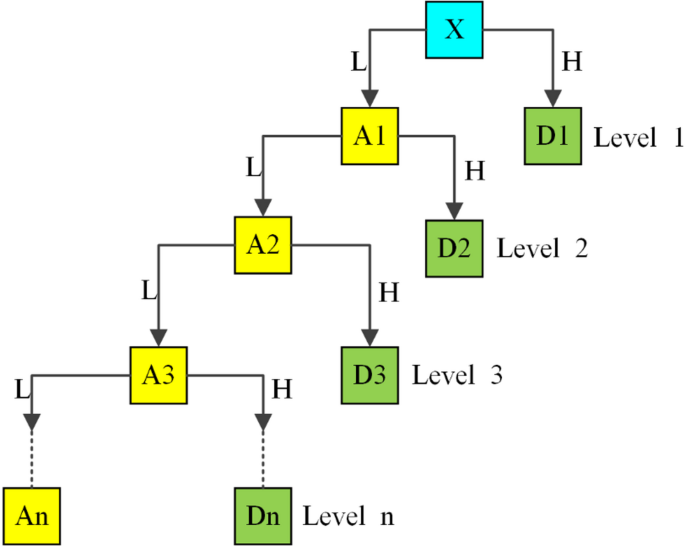
In this section, we examined how to decompose polygons based on concave points. This process tackles two main issues: (1) identifying which points are concave in the polygon, and (2) traversing the decomposed polygons to ensure full area…
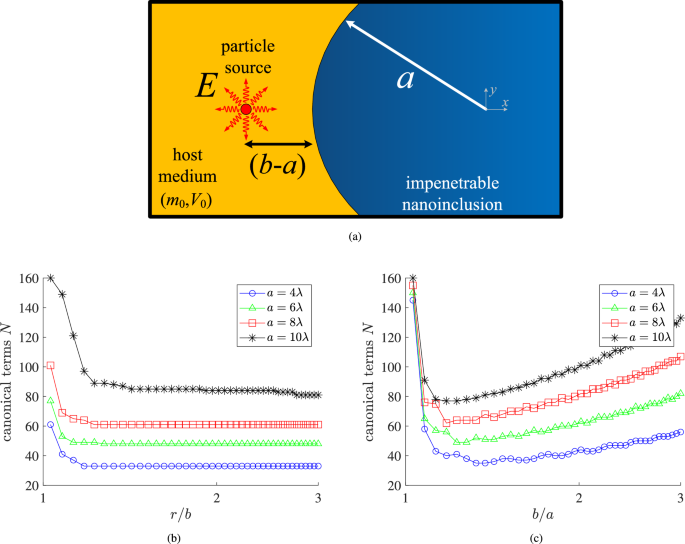
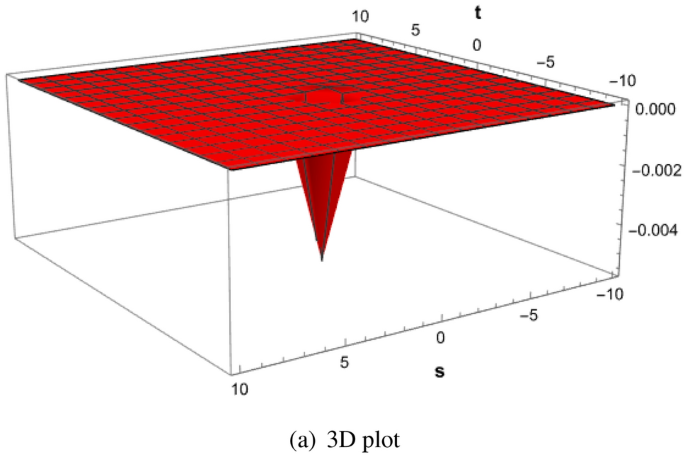
It should be stressed that in actual quantum interactions we have \(k_0a\gg 1\); as a result, the number of required canonical terms N to evaluate both the series in (1) is much larger than these indicated in Figs. 1b,c. Therefore, the direct…
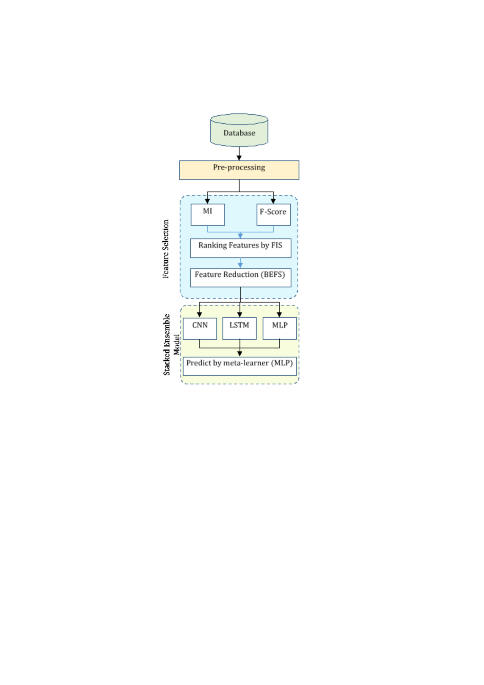
In this section, the method of collecting the necessary data for the research and the characteristics of this data are described. Then, the steps of the proposed method for predicting the academic performance of students in higher education are…

Wasfy, M. M. & Lee, I.-M. Examining the dose–response relationship between physical activity and health outcomes. NEJM Evid. 1(12), EVIDra2200190 (2022).
Google Scholar
Servais,…
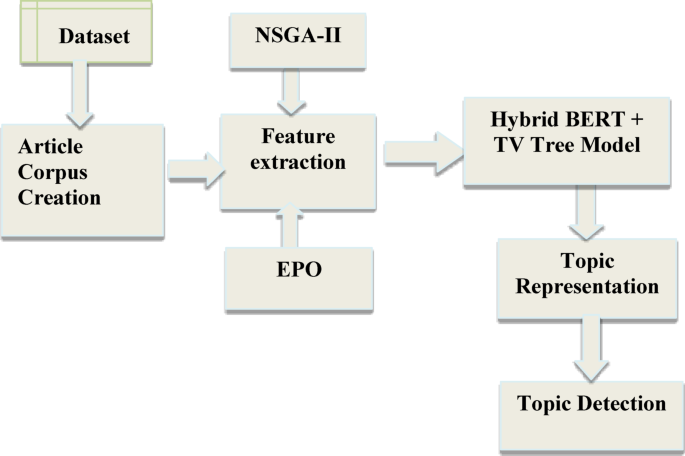
This paper proposes a Research Topic Detection System (RTDS) that finds popular research topics within a specific field of study. This suggested system identifies study subjects and popular keywords that aspiring researchers can utilize as search…
To fully demonstrate that the BWDformer model can achieve effective and outstanding performance in the field of runoff prediction, this study compared it with several typical models, including CNN, LSTM, Transformer,…
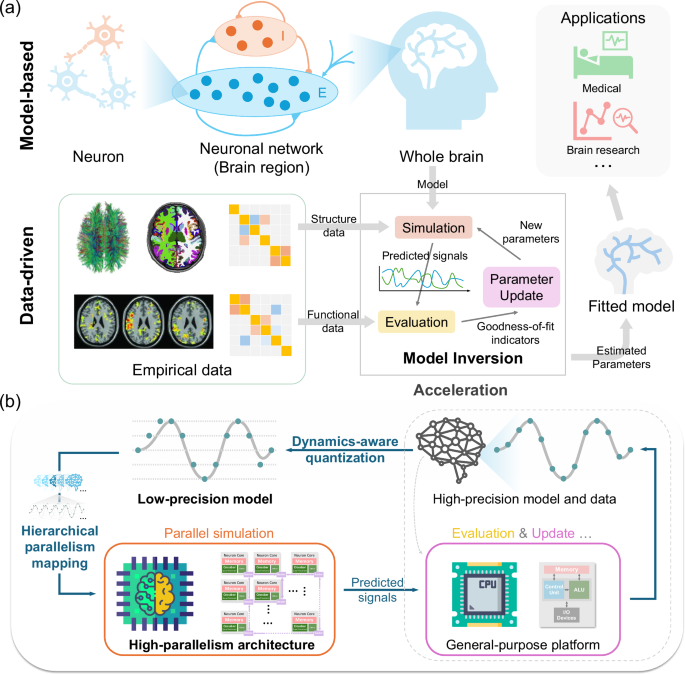
In this work, we use the DMF model proposed in prior work21 to simulate the brain dynamics. It describes the dynamics of the network containing excitatory and inhibitory populations of spiking neurons interconnected via…
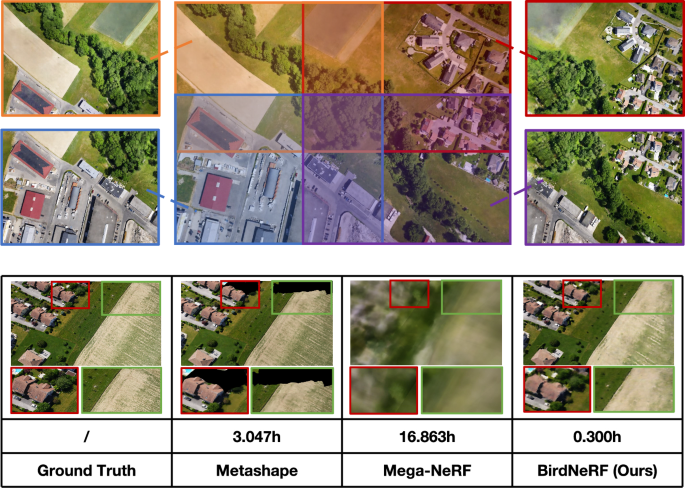
Representing and reconstructing large-scale scenes, such as those found in aerial imagery, presents significant challenges due to the inherent scalability limitations of training a single NeRF. To address these issues, we propose BirdNeRF, a…
Assume the Ion Sound Langmuir system44 which is of the form,
$$\begin{aligned} {\left\{ \begin{array}{ll} \iota U_{t} + \frac{1}{2}U_{ss}-ZU = 0,\\ Z_{tt}-Z_{ss}-2(|U|^{2})_{ss}=0. \end{array}\right. } \end{aligned}$$
(2.1)
…