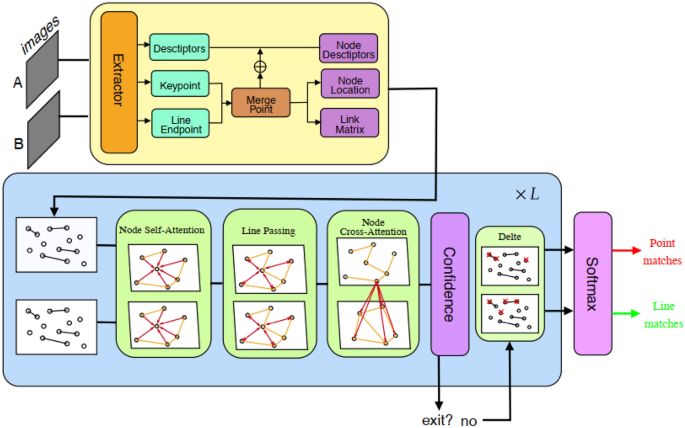
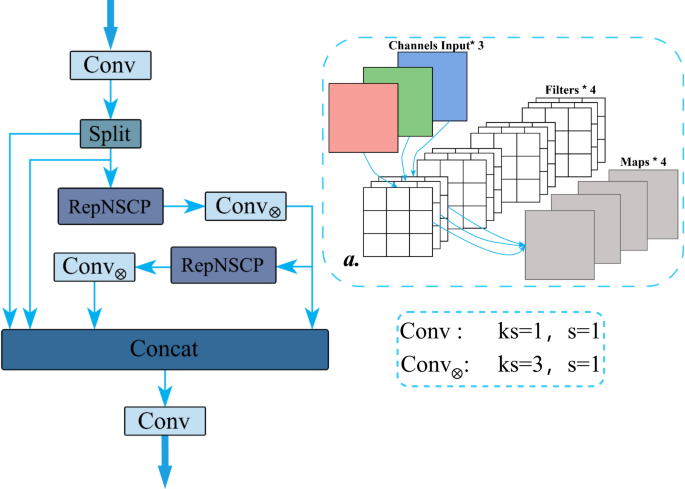
This section presents the architectural framework and systematic integration methodology of Depth Point-Line Attentional Graph Neural Networks (DPLAGNNs) within SLAM systems, specifically targeting enhanced environmental perception in dynamic…
Category: 7. Maths
-
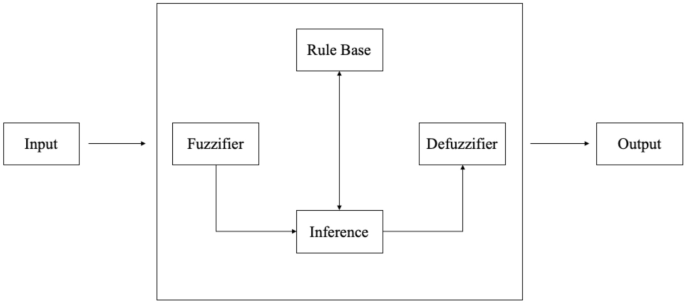
Predicting academic performance with fuzzy logic in prospective physical education and sports teachers
This study employed a quantitative research design to investigate the relationships between academic self-efficacy, peer support, learning approaches, and academic performance in physical education and sports teaching. We explored how these…
Continue Reading
-
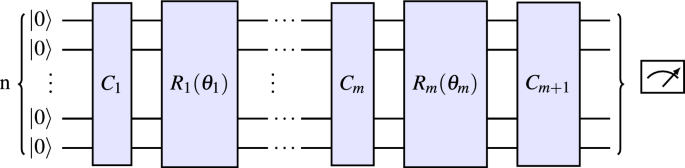
Introducing the kernel descent optimizer for variational quantum algorithms
In this section, we present a detailed experimental comparison of kernel descent with \(L=1\) versus gradient descent, as well as kernel descent with \(L=2\) versus quantum analytic descent. As explained in Sect. 2.5, these pairings are chosen…
Continue Reading
-
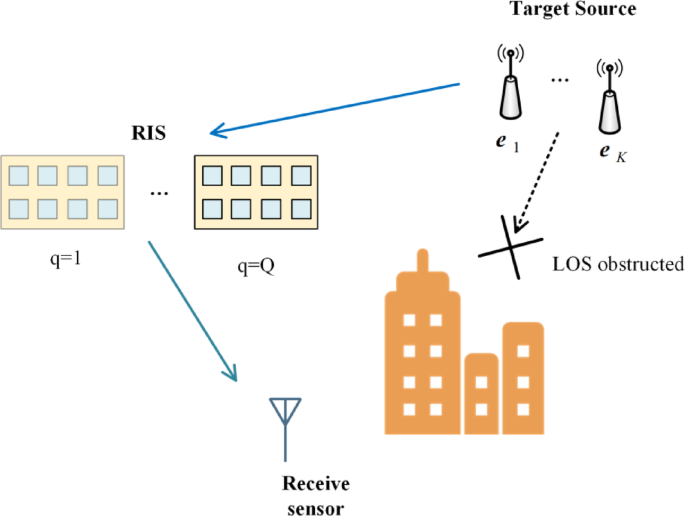
RIS-assisted anti-spatial aliasing direct localization in NLOS scenarios via spatio-temporal-frequency information fusion
-
1.
Spatial sparse reconstruction.
To obtain the target location information, we leverage the signal’s sparsity through…
Continue Reading
-
1.
-
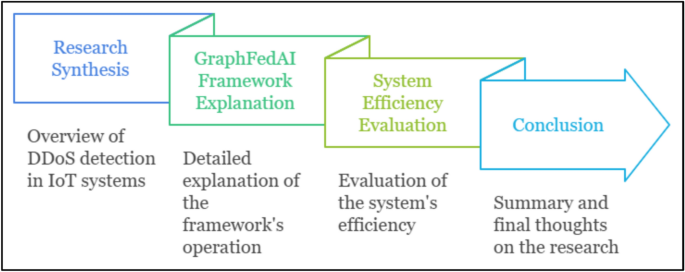
GraphFedAI framework for DDoS attack detection in IoT systems using federated learning and graph based artificial intelligence
Research goal
The research GraphFedAI provides a topology-aware, scalable, and privacy solution to identify DDoS attacks in IoT systems. The GraphFed AI integrates an FL model with a graph neural network to overcome difficulties while managing…
Continue Reading
-
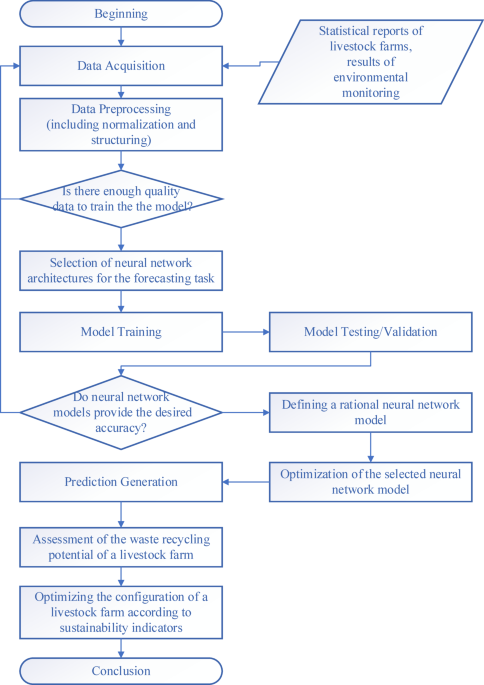
Models for sustainable management of livestock waste based on neural network architectures
The developed approach to livestock waste management is based on the use of neural network models to analyze and predict waste volumes, assess the potential for their conversion into energy, and minimize environmental impact. This approach…
Continue Reading
-
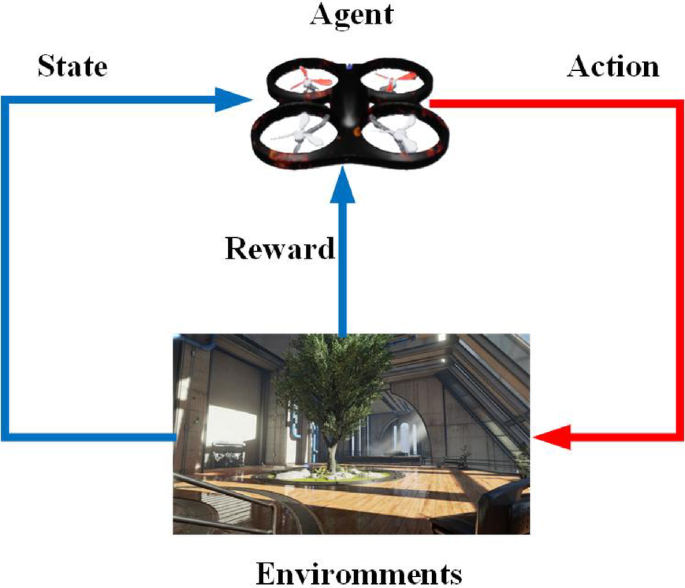
Improved double DQN with deep reinforcement learning for UAV indoor autonomous obstacle avoidance
To verify the effectiveness of the improved Double DQN algorithm in UAV indoor autonomous obstacle avoidance, this paper constructs a high-resolution and high-performance simulation environment based on AirSim and UE4 (Unreal Engine 4). The…
Continue Reading
-
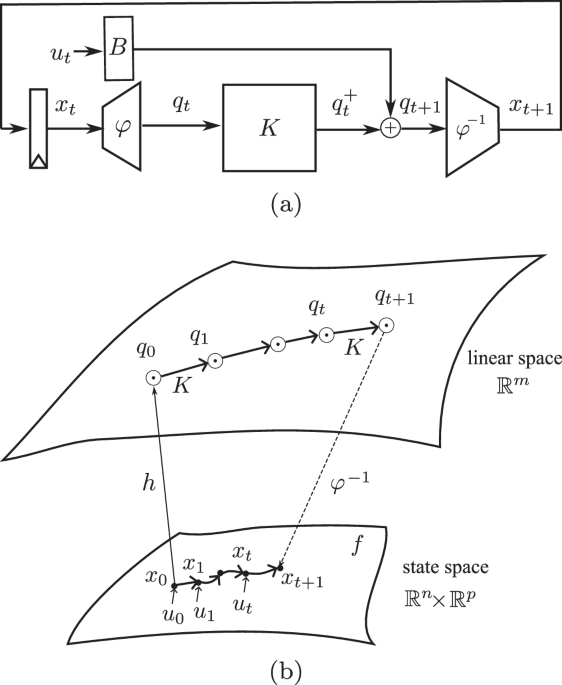
Recursive regulator: a deep-learning and real-time model adaptation strategy for nonlinear systems
Background
This section presents a brief overview of the nonlinear dynamics and the Koopman operator framework, which provides the foundation for our regulator design.
We begin with a representative formula for general nonlinear discrete systems:
Continue Reading
-
DMM-YOLO: A high efficiency soil fauna detection model based on an adaptive dynamic shuffle mechanism
In this section, ablation experiments are first conducted on the VOC-mini dataset to evaluate the impact of different components on the performance of the DMM model. Then, comparative experiments are carried out against several existing…
Continue Reading
-
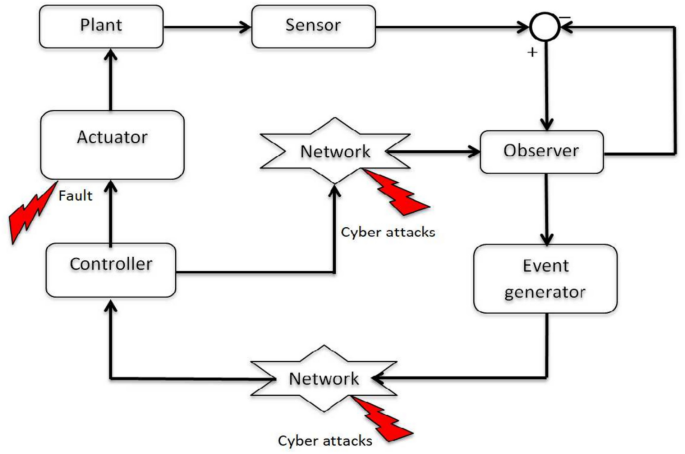
Observer based resilient security control for networked nondeterministic Markovian jump systems with cyber attacks and its applications
In this section, new stability conditions for the system (8) will be derived based on the Lyapunov stability theory and linear matrix inequality approach, where observer-based resilient event-triggered controllers gain matrices can be obtained….
Continue Reading