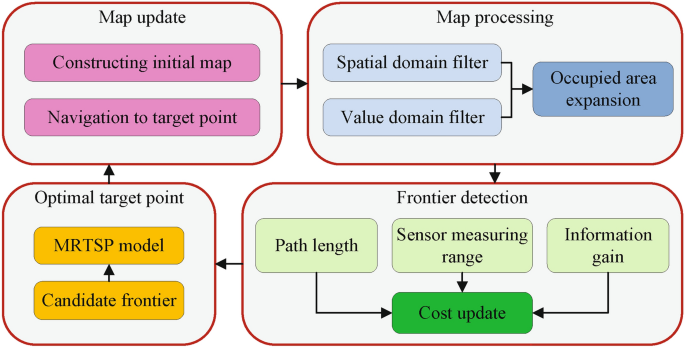
Our proposed autonomous exploration process is illustrated in Fig. 1. Initially, we construct and optimize a map using sensor data. Following this, frontier detection and cost evaluation are performed on the optimized map, where the frontier cost…
Enhancing autonomous exploration for robotics via real time map optimization and improved frontier costs